
From the 1San Camillo IRCCS srl, Laboratory of Neurorehabilitation Technologies, 2Azienda ULSS 3 Serenissima, Physical Medicine and Rehabilitation Unit, Venice, Italy and 3University of Cadiz, Nursing and Physiotherapy Department, Cadiz, Spain
Objective: To analyse the effect of virtual reality (VR) ther-apy combined with conventional physiotherapy on balance, gait and motor functional disturbances, and to determine whether there is an influence on motor recovery in the subacute (< 6 months) or chronic (> 6 months) phases after stroke.
Methods: A total of 59 stroke inpatients (mean age 60.3 years (standard deviation (SD) 14.8); 14.0 months (SD 25.7) post-stroke) were stratified into 2 groups: subacute (n = 31) and chronic (n = 28). Clin-ical scales (Fugl-Meyer lower extremity (FM LE); Func-tional Independence Measure (FIM); Berg Balance Scale (BBS); Functional Ambulation Category (FAC); modified Ashworth scale (MAS); 10-metre walk test (10MWT); and kinematic parameters during specific motor tasks in sitting and standing position (speed; time; jerk; spatial error; length) were applied before and after treatment. The VR treatment lasted for 15 sessions, 5 days/week, 1 h/day.
Results: The subacute group underwent significant change in all variables, except MAS and length. The chronic group underwent significant improvement in clinical scales, except MAS and kinematics. Motor impairment improved in the severe ≤ 19 FM LE points, moderate 20–28 FM LE points, mild ≥ 29 FM LE points. Neither time since stroke onset nor affected hemisphere differed significantly between groups. The correlations were investigated between the clinical scales and the kinematic parameters of the whole sample. Moreover, FM LE, BBS, MAS, and speed showed high correlations (R2> 0.70) with independent variables.
Conclusion: VR therapy combined with conventional physiotherapy can contribute to func-tional improvement in the subacute and chronic phases after stroke.
Key words: virtual reality therapy; stroke rehabilitation; physical therapy modality; lower extremity; gait disorder, neurological.
Accepted Oct 13, 2020; Epub ahead of print Nov 4, 2020
J Rehabil Med 2020; 52: jrm00122
Correspondence address: Pawel Kiper, San Camillo IRCCS s.r.l., via Alberoni 70, Azienda ULSS 3 Serenissima, Physical Medicine and Rehabilitation Unit, Piazzale Rava 1 30126 Venezia, Italy. E-mail: pawel.kiper@ospedalesancamillo.net, pawelkiper@hotmail.com; and Carlos Luque-Moreno, University of Cadiz, Nursing and Physiotherapy Department, Cadiz, Spain. E-mail: carlos.luque@uca.es
Doi: 10.2340/16501977-2763
Specific treatment, enriched with artificially reinforced feedback, may facilitate physiological activation of the brain areas devoted to motor learning. Based on this rationale it was hypothesized that motor learning could be improved when an enriched environment focused on optimizing the interaction between the human body and the physical environment is used for motor training. The aims of this study were to examine the effect of virtual reality therapy on balance, gait and motor impairment, and to determine whether there is an influence on motor recovery in the subacute (< 6 months) or chronic (> 6 months) phases after stroke. This study was conducted among stroke inpatients, divided into 2 groups (subacute and chronic). Patients improved fower limb function in both subacute and chronic stroke phase. Virtual reality therapy could be a useful tool for specific rehabilitation of the lower limb, which may lead to improved rehabilitation outcomes.
Several neurophysiological studies have shown that, after a brain lesion, the central nervous system (CNS) undergoes phases of neuronal reorganization (1). This neurophysiological mechanism, called neuroplasticity, is based on two fundamental process-es; functional reorganization of neuronal circuits and structural restoration of damaged circuits (e.g. axonal sprouting). Neuroplasticity after stroke can be regarded as a mechanism of spontaneous recovery, or else the biological basis for restorative rehabilitation modalities, thus promoting physiological mechanisms of recovery through adequate stimuli (2). The purpose of rehabilitation in stroke survivors is to address these neurophysiological mechanisms of restoration and reorganization, with the aim of exploiting all the potential of motor learning. Recent findings suggest that therapeutic modalities should be deployed on the basis of motor learning principles to reshape disrupted neural circuitries, allowing voluntary motor activation to emerge (3–5). Thus the recovery process under-pinned by rehabilitation modalities could be intended as a learning process deployed by the CNS (6).
Infarction or haemorrhage of the neural tissue often results in severe neurological disorders. Apart from sensory disorder, muscle weakness, aphasia or apraxia, balance and walking inability are among the most devastating consequences of stroke (7). Moreover, impairment of the lower extremity (LE) muscles has an important correlation with limitations in balance and walking ability. Therefore, gait recovery is a primary aim to be pursued in stroke rehabilitation. On the other hand, LE rehabilitation cannot be regarded only as gait training (i.e. supported or unsupported walking), but should take into consideration all pre-walking rehabil-itation processes, which comprise training in both sitting and standing positions. Change in compensatory gait patterns is difficult in post-stroke patients, and rehabilitation protocols with training of activation of selective muscles in a sitting or standing position is advantageous for future functional movements (1, 8).
In the last decade, therapeutic modalities based on virtual reality (VR) technologies for rehabilitation have shown positive results in post-stroke gait and balance recovery (3, 9). Innovative technologies have provided the opportunity to enrich the environment in which motor rehabilitation programmes are carried out. This enrichment could potentially facilitate physiological activation of brain areas devoted to motor learning (10, 11). Previous research has demonstrated that training in a virtual environment promotes learning in both healthy subjects and patients after stroke, due to augmented feedback related to motor performance and outcomes provided by VR (12, 13). Moreover, some reviews have reported that VR therapy, when applied to the LE, results in moderate improvement in motor function (14). According to the literature, the use of VR ensures a greater number of repetitions than the same training using traditional therapy, which can have a positive influence, not only on motor recovery, but also on enhancing balance and physical fitness (7, 15, 16). Some studies suggest that VR therapy in patients after stroke can have a positive impact on balance and gait recovery (17). Conversely, Laver et al. states that there is insufficient evidence to claim that VR therapy can increase, for example, speed walking (13). This could be due to the heterogeneity of the VR systems used for post-stroke LE functional recovery, which makes it difficult to draw firm conclusions. How-ever, it seems that postural exercises with enhanced feedback (18), enriched by virtual obstacles (19) in the non-immersive modality can have a positive effect on walking speed. Increased walking speed has indeed been observed following VR therapy using a treadmill (20) and after execution of functional tasks (21), even in the sitting position (22). Despite these positive results, there is strong evidence to support that walking training at moderate-to-high intensities or VR therapy should be applied in patients with chronic stroke to improve walking speed or distance (3, 17, 23). Conversely, there is weak evidence to support that strength training, combined training or cycling training at moderate-to-high intensities, and VR balance training may improve walking speed and distance in these patient groups (24).
It seems, then, that more intensive therapy results in better outcomes, and that the effect of VR in addition to conventional physiotherapy (CP) could provide an optimal complement in improving the functionality of the LE (25). However, there is some controversy, since parameters such as walking speed are not only improved with intensive VR gait training. Analytical training, even in the sitting or standing position, is also crucial in the chronic stages. For example, to achieve an effective gait, the patient with stroke first needs to undergo analytical training in order to improve joint kinematics, and then integrate and automate this improvement into gait re-education. Thus, the final objective may be focused on functional aspects of gait (not necessarily gait speed alone) with less compen-sation and less energy expenditure, enabling patients to walk greater dis-tances (1, 8).
The present study used a non-immersive VR modality with reinforced visual and auditory feedback. VR therapy was based on analytical work in both sitting and standing positions, through the application of functional tasks (such as climbing a step (25)) in a population of stroke patients in subacute and chronic phases (21). The aim of the study was to evaluate possible clinical differences due to the implementation of this approach in these different groups.
The primary objective of this study was to examine the effect of VR LE therapy combined with CP on balance and gait functional disturbances and overall level of motor function (i.e. severe, moderate, mild) in post-stroke patients. Further aims were: to analyse whether time since stroke influences greater motor recovery of the LE in the subacute (< 6 months) or chronic (> 6 months) phase; to explore the correlation between kinematic parameters and clinical scales; and to analyse differences in motor outcomes related to the side of brain lesion (i.e. right or left).
Participants and design
This pilot study was conducted among inpatients at the Neurorehabilitation Department of the IRCCS San Camillo Hospital, Venice, Italy. The study group comprised patients affected by a first episode of ischaemic or haemorrhagic stroke, enrolled during 2011 to 2016. The sample comprised 59 patients (13 females, 46 males), 41 (69%) affected by ischaemic stroke and 18 (31%) by haemorrhagic stroke. Right hemisphere lesion was present in 29 (49%) subjects, whereas 30 (51%) participants had a lesion of the left hemisphere. The mean age of all patients was 60.3 years (standard deviation (SD) 14.8) with 14.0 months (SD 25.7) since stroke. The subacute group comprised 31 patients with mean distance from stroke onset 2.8 months (SD 1.3). The chronic group comprised 28 patients with mean time since stroke onset 26.0 months (SD 34.0). Written informed consent was obtained from all participants before the first therapeutic session.
The experimental protocol, procedures of enrollment, and data acquisition/storing, were executed in accordance with the ethical standards on human experimentation and in accordance with the principles of the Declaration of Helsinki 1975, revised Hong Kong 1989 (26) .
Inclusion criteria were: first ischaemic or haemorrhagic stroke, ability to maintain standing position for one min (with and without support), presence of active movements of affected LE. Exclusion criteria were: cognitive impairment (defined as score lower than 24 on the Mini-Mental State Examination (MMSE)) (27), presence of apraxia (defined as score lower than 62 points at the De Renzi test) (28), impairment of verbal comprehension (defined as a score higher than 40 errors on the Token test) (29), evidence in the clinical history of neglect, concurrent diagnoses of diseases affecting the possibility to execute rehabilitation exercises with the LE (e.g. fracture, joint dislocation).
Patients were stratified into 2 groups according to time since stroke onset (i.e.< 6 months = subacute group; > 6 months = chron-ic group). For all patients the treatment lasted 1 h a day, 5 days a week, for 3 weeks. According to available literature 15 sessions of VR therapy would be sufficient to observe functional improvement (13). In addition, patients were divided into severe, moderate or mild groups to study clinical and kinematic improvements in relation to level of impairment (i.e. severe ≤ 19 FM LE points, moderate 20–28 FM LE points, mild ≥ 29 FM LE points).
Outcome measures
For all enrolled patients the medical history was reviewed, a unique patient’s study number was assigned, and adverse events were registered. Each completed form was then digitized in a study management database.
All the clinical and kinematic measures were acquired both before and after therapy. The clinical protocol included: Fugl-Meyer scale for LE motor function (FM LE – primary outcome), which is recommended for use in post-stroke hemiplegic patients and is a widely used quantitative measure (30, 31); Berg Balance Scale (BBS) for static and dynamic balance and non-vestibular functional mobility, which is highly recommend-ed for stroke patients in the subacute and chronic phases (32); 10-metre walk test (10MWT) for gait speed, functional mobility and vestibular assessment, which is highly recommended for evaluation of post-stroke survivors in the subacute and chronic phases (33); Functional Ambulation Category (FAC) for gait capacity, which is considered reasonable for use in subacute and chronic stroke patients (34); Functional Independence Measure (FIM) for global independence, which measures the level of a patient’s disability and indicates the required level of assistance in activities of daily living (ADL) (35); modified Ashworth scale (MAS) for spasticity in patients with CNS lesion, which is recommended for use in the subacute and chronic phases (36).
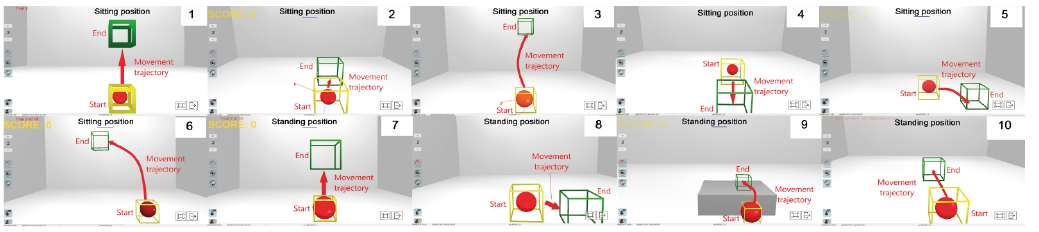
Furthermore, the kinematic protocol consisted of 10 standard-ized motor tasks covering the main axes (e.g. flexion, abduction, adduction, rotations) and joints (e.g. hip, knee and ankle) of LE motion, to be performed each for 10 consecutive trials. The first 6 motor tasks were performed in a sitting position, and the remaining 4 in the standing position. Assessment in the sitting position consisted of: (i) dorsiflexion of the ankle joint with the knee at 90° of flexion, (ii) sliding of the foot on the ground (i.e. the knee extension out of gravity force), (iii) extension of the knee against gravity, (iv) internal and external rotation of the hip, (v) knee flexion beyond 90°, (vi) hip abduction and adduction. Assessment in the standing position consisted of: (vii) knee flexion and extension, (viii) abduction and adduction of the hip (i.e. half step to the side), (ix) step forward, (x) climb on a step (Fig. 1). Prior to assessment each patient had the opportunity to familiarize themselves with the VR system by performing 2–3 attempts. The end-effector sensor was placed on the third metatarsal bone for each recorded movement. Afterwards the following kinematic parameters were computed as the overall mean of all the executed tasks: speed: mean linear velocity (mm/s); time: mean duration (s); jerk: mean number of sub-movements (number) defined as a movement smoothness change from the requested movement path; spatial error: mean spatial error (mm2) defined as the displacement from the optimal trajectory of equested task; Length: mean length of covered distance (mm) (37).
Fig. 1. (1) Dorsiflexion of the ankle joint with the knee at 90° flexion; (2) sliding of the foot on the ground; (3) extension of the knee against gravity; (4) internal and external rotation of the hip; (5) knee flexion beyond 90°; (6) hip abduction and adduction; (7) knee flexion and extension; (8) abduction and adduction of the hip; (9) climb on a step; (10) step forward.
Virtual reality system
The patients were treated using the Virtual Reality Rehabilitation System (VRRS; Khymeia Group Ltd, Noventa Padovana, Italy) comprising a PC workstation connected to a 3D motion tracking system (Pohlemus LIBERTY Colchester, VT, USA). The VRRS was equipped with editor software, allowing the tailoring of any type of motor tasks within the workspace of the motion tracking system. Recorded tasks were displayed in a virtual scenario and used for training. The VRRS system allows the starting position and the characteristics of the target, such as its orientation, for each task or the addition of other virtual objects to increase the complexity of the tasks, to be determined
In addition, specific feedback termed a “virtual teacher” can be displayed online during every task repetition. The virtual teacher automatically executes the correct movement, which the patient must emulate. This type of feedback is thought to promote motor adaptation via a supervised learning mechanism. The visual feedback provides online information on motor performance quality, allowing real-time visual comparison between a patient’s execution and the virtual teacher’s execution of a movement. Finally, the VRRS elaborates performed trajectories from each executed virtual task and compares them with the correct trajectory pre-recorded in a virtual scene. This result is presented to the patient on the screen. VR technology increases the range of possible tasks and generates stimuli to facilitate the movement learning without error. The ability to capture motor tasks enables the analysis of the results. In addition, the VRRS system allows creation of scenarios similar to the patient’s real environment and generates real-time feedback in various forms depending on the motor task, thus quantifying the therapy programme and improving patient motivation using real-time task evaluation and reward. It also permits standardization of tasks and automatic recording of the results, giving a wide view of the progress of treatment (7, 37).
Intervention
During the VR therapy the subject was seated or standing in front of a large computer screen. The electromagnetic sensor was positioned at different locations on the patient’s leg and in accordance with the exercise objective it represented the task end-effector (e.g. it was placed on the foot, ankle, knee or hip, depending on the virtually represented task to be accomplished). The VRRS permits the use of 2 sensors. Thus, one sensor was used as an end-effector and a second sensor detected inadequate position compensation. For example, in some exercises patients were asked to maintain attention on their trunk position. In this case an additional sensor was placed on the sternum, to control uncorrected and compensatory movements of the trunk. Thus, through end-effector, the system was able to detect the position of the subject’s leg in the physical environment and to process the signal by computer to display movement (i.e. virtual motion path) coherent with the real one. Through an additional sensor the system was able to visualize compensatory movements and provide visual feedback for the subject’s correction. The desired movement and trajectory were also displayed in the background of the virtual scene in order to facilitate the subject’s perception and adjustment to motion errors. The physiotherapist could create numerous virtual tasks for the leg treatment through the VRRS editor, thus the complexity of each motor task was tailored in accordance with the LE deficit of the individual participant. In the virtual scenario, the physiotherapist was able to determine several features, such as the starting position and the characteristics of the target (e.g. orientation, degrees of freedom to be controlled, textures). To increase the complexity of the task, additional virtual objects to avoid or pass through were displayed in each scene. During the treatment the patient performed several exercises in sitting and standing positions and each task was enhanced by multimodal feedback (i.e. visual, auditory, sensory). The number of exercises and repetitions were adjusted individually. Visual feedback was mediated by the virtual end-effector moving coherently with patient’s leg movement, and by the trajectory representing the correct path that patient had to follow (optimal trajectory represents natural movement recorded by a healthy person). Auditory feedback was provided in real-time during each task, when the start and final positions were reached, respectively. Sensory feedback was provided when the patient interacted actively with the physical environment (e.g. stepping up or down on a real step) (Fig. 2). Thus, each virtual task provided specific real-time reinforced feedback, aimed at amplifying reward and minimizing error in movement performance. Since, after stroke motor control of both LEs is modified, complex exercises within the VR environment were used for their normalization. For example, in a standing position, the patient was asked to stand on the non-paretic limb and perform open kinetic trajectories with the paretic limb to improve the oscillation phase. Conversely, to optimize the proprioception of the paretic LE, the patient was asked to stand on the paretic limb. Hence, the non-paretic LE was moved towards different trajectories in an open kinetic chain. This exercise aimed to improve gait patterns by providing constant sensory input from the affected LE. During the VR session the patient had to follow a predicted trajectory between specific degrees. The start and the end-point of each exercise were adjusted to the patient’s extremity length and range of movement (ROM). For example, for knee flexion in the sitting position the starting point was set at 90° (with a sensor fixed on the third metatarsal); however, the end-point was set at different degrees taking into consideration patient’s motor capacity. Afterwards, the physiotherapist was able to increase the ROM of requested movement in accordance with patient’s progression. Each VR therapy session was personalized to the patient’s needs and the execution of selective movements or task-oriented complex movements were not restricted to specific number of repetitions. Moreover, feedback from kinematic parameters regarding the achievement of a requested motor task was given in the form of standardized scores together with an augmented sensory feedback.
In addition, all enrolled patients were treated in a one-to-one setting in the hospital rehabilitation service. The training was based on a CP following stroke, in accordance with the rehabilitative principles to: reduce the degree of disability, improve quality of life and reduce direct and indirect stroke-related health dysfunction. Patients received complex rehabilitation of the trunk, upper and lower limbs, comprising passive, active-assisted and active exercises as well as gait training, when appropriate. Each training programme (i.e. duration, amount of single exercise and number of repetitions) was personalized to a patient’s motor capacities with progressive complexity and was coordinated by the clinical physiotherapist.
Fig. 2. (A) Post-treatment trajectory visualization. (B) Patient interacts actively with the physical environment by stepping up and down on a real step.
Statistical analysis
The distribution skewness was studied with the Shapiro–Wilk test and, according to the results, parametric (paired samples t) or non-parametric (Wilcoxon signed-rank) test was used to determine any significant change in outcomes after treatment. The enrolled patients were stratified a priori according to time since stroke onset into a subacute (< 6 months) and a chronic group (> 6 months) and brain lesion side (i.e. right, left), thus unpaired samples t-test or Mann–Whitney U test were used to compare any difference due to time from stroke (subacute vs chronic) and hemisphere affected (right vs left). Analysis of variance (ANOVA) or Kruskal– Wallis test were used to compare any differences between variables related to the level of impairment (i.e. severe, moderate, mild). In case of statistical significance, the Bonferroni correction for the significance of p-values of the post-hoc tests was applied. A multivariate linear regression model was used to infer any potential relationship between dependent variables (i.e. BBS, 10MWT, FAC, FIM, FM LE, MAS, speed, time, jerk, spatial error, length of covered distance) and independent variables (i.e. age, sex, lesion side, time since stroke, type of stroke, as well as the baseline of the dependent variables). The correlation between kinematic parameters and clinical scales was analysed with Spearman’s rho test. Statistical significance was set at p< 0.05.
All patients reported being comfortable throughout the training and did not experience any side-effect caused by interaction with the virtual environment (e.g. nausea, dizziness, headache, disorientation) (38). The effect size was calculated from the available data for this study and based on the FM LE outcome. Thus, the effect size for this study is d = 0.25 with a power of 0.48 and α = 0.05. The baseline characteristics of the patients are shown in Table I.
*p-value < 0.05 χ2 Proportion Test for qualitative measures, Shapiro–Wilk Normality test for quantitative measures. p-value shows differences between subacute and chronic group. Severe: Fugl-Meyer lower extremity scale ≤ 19 points. Moderate: Fugl-Meyer lower extremity scale 20–28 points. Mild: Fugl-Meyer lower extremity scale ≥ 29 points.
Pre- and post- treatment analysis
All the clinical and kinematic variables improved significantly after treatment (Table II). With regard to functionality and kinematics, patients in the subacute group improved in all the parameters, except MAS and length. Furthermore, these observed changes were statistically significant. Patients in the chronic group showed statistically significant improvement in all clinical scales, except MAS. However, this improve-ment was not observed for kinematic parameters.
Table II. Effect of virtual reality (VR) therapy for lower limb recovery
Between-group analysis (subacute vs chronic)
Neither distance from stroke onset (i.e. FM LE p = 0.812; FIM p = 0.394; BBS p = 0.596; FAC p = 0.120; MAS p = 0.504; 10MWT p = 0.632; speed p = 0.292; time p = 0.930; jerk p = 0.948; spatial error p = 0.814; length p = 0.563;), nor hemisphere affected (i.e. FM LE p = 0.426; FIM p = 0.365; BBS p = 0.507; FAC p = 0.740; MAS p = 0.189; 10MWT p = 0.187; speed p = 0.389; time p = 0.350; jerk p = 0.398; spatial error p = 0.739; length p = 0.543;) showed significant differences between groups, in both clinical and kinematic variables.
Impairment severity
Patients were subdivided according to their motor impairment as measured on the FM LE scale (severe ≤ 19 points, moderate 20–28 points, mild ≥ 29 points). Analysis of patients with severe impairment showed statistically significant within-group improvement for: FM LE (p< 0.001), BBS (p< 0.001), 10MWT (p = 0.004), jerk (p = 0.039) and spatial error (p = 0.016). Statistically significant improvements were observed within the moderate group for: FM LE (p< 0.001), FIM (p = 0.007), BBS (p< 0.001), FAC (p = 0.015), 10MWT (p = 0.003), time (p = 0.004) and jerk (p = 0.003). Finally, statistically significant improvements were observed within the mild group for: FM LE (p = 0.028), FIM (p = 0.033), BBS (p = 0.008), FAC (p = 0.037), 10MWT (p = 0.006), speed (p = 0.039), time (p = 0.038), jerk (p = 0.034), spatial error (p = 0.006) and length (p = 0.032). Analy-sis between subgroups (i.e. severe, moderate, mild) did not reveal any significant differences (Table III).
Table III. Effect of virtual reality (VR) therapy in relation to impairment severity
Clinical scales and kinematics correlation
Analysis of correlations between clinical scales and kinematic variables showed correlations between BBS scale and spatial error, and jerk. It is worth noting that BBS and spatial error correlated with a low positive correlation index (directly proportional). Whereas, BBS and jerk were correlated with a low negative correlation index (inversely proportional). All other analyses found no correlation between clinical scales and kinematics (Table IV).
Table IV. Correlations between clinical scales and kinematic variables.
Linear regression model
The multivariate linear regression model showed that all analysed parameters were related to initial assessment. Moreover, the following clinical tests, FM LE, BBS, MAS, and speed parameter showed high correlation (i.e. R2> 0.70) with independent variables (Table V).
Table V. Relationship between dependent and independent variables
This study shows that a virtual reality environment combined with CP can help to foster recovery of the LE. Recent literature reveals that time since stroke onset plays an important role in the recovery process (13). However, the data from the current study shows that patients treated in the virtual environment can also improve in the chronic phase. The VR therapy provid-ed to the patients was beneficial for both chronic (> 6 months after stroke) and subacute groups (< 6 months after stroke). In depth, this improvement was confirmed through clinical scales; however, kinematic assessment revealed that only patients within 6 months of stroke onset improved significantly. It is worth noting that the subacute group might have improved more regarding the kinematics because these participants had less severe impairments. According to recent research, patients in the chronic stage may need more sessions to correct their motor pattern (24). It could also be important for clinical implications that the parameter of speed improved in subacute stroke patients, giving a hypothetical indication for the window of time in which VR therapy should be provided. Thus, chronic stroke patients can achieve satisfactory levels of functionality, as measured by clinical scales, but from the kinematic point of view the movement remains incorrect, proba-bly due to compensatory movements, which can be measured precisely in a virtual environment. However, at this stage of the study the patients’ kinematics did not differ significantly between groups. Furthermore, from the functional perspective, the findings of this study indicate that some process of neural recovery can also be triggered in the chronic phase after stroke, and that this type of enhanced feedback, with task-oriented exercises, can promote motor improvement towards functionality.
Analysis of level of impairment did not differ between groups. However, only patients with mild impairment (i.e. < 29 FM LE points) improved signifi-cantly in all outcome measures. In-depth, functional improvement, but not kinematic improvement, was noted on clinical scales for the severe, moderate and mild subgroups. It seems that in patients with mild severity of impairment it is possible to increase gait speed or time of task execution. These improvements were not observed in the severe and moderate groups.
This study also showed that patients’ improvement was not related to the side of the brain lesion. This may be due to the high level of user interaction with the virtual environment, mediated by multisensorial feedbacks provided during treatment. Thus, flexibility of the VR system permitted the creation of individual VR therapy for each patient promoting recovery of patient’s deficit independently from the brain lesion side (23, 37).
In addition, the clinical scales were not correlat-ed with kinematic parameters, indicating that both metrics are probably not related to patients’ changes. The exception was the BBS, which correlated with the spatial error and jerk parameters. The significant correlation between kinematics (i.e. spatial error and jerk) and BBS was weak, however, it may suggest real change in motor control or, at least, partial normalization of compensatory pattern. These changes can be considered as an indication of neurological recovery in post-stroke survivors (39).
The regression model used in this study, showed that analysed dependent variables, i.e. clinical scales and kinematics, were correlated with the independent one (i.e. sex, age, lesion side, time since stroke, type of stroke). All scales were affected by the baseline outcome. However, the margin of error was relatively high and these models can change with sample size increment. Therefore, the brain lesion side and the time since stroke onset that influenced dependent variables can only be explained hypothetically. The MAS, which was influenced negatively by both lesion sides, hypo-thetically shows uncontrolled muscular hypertonia, which is often present after stroke. However, time since stroke, positively affecting both MAS and the time parameter, could indicate that the longer the time from stroke onset, the higher spasticity would be observed, and that more time would be required for execution of the exercises (25). However, the distribution of residuals was not normal in these models, hence they may change. On the other hand, it was observed that FM LE, BBS, speed, spatial error and length were importantly affected by independent variables, also showing normal distribution of residuals. In depth, the FM LE was affected negatively by the time since stroke, indicating lower point scores in chronic patients. There-fore, importantly, this can indicate that time since stroke onset limits the recovery of functional mobility. The BBS was negatively influenced by the right lesion side and positively by the left lesion side. This could be due to cognitive impairments or neglect mostly present in patients with right hemisphere damage, which can reduce spatial orientation ability, and so affect the score of the balance scale. Kinematics were negatively dependent on age, showing, importantly, that ageing can reduce movement speed. Finally, both spatial error and length were affected positively by male sex. This may be related to anatomical predisposition between males and females.
Studies of motor learning performed on healthy people have shown that the level of improvement in motor performance depends on the amount of exercise, task difficulty, task variability, attention and motivation (4, 11, 12). Thus, neurorehabilitation could be based on the assumption that these components of motor learning can influence motor recovery after injury to the CNS. On the other hand, there is a lack of studies in which the consequences of neurological damage on motor learning processes have been studied. Nowa-days, some researchers argue that motor learning, which can be affected differently depending on lesion localization, exists in multiple types (10). For example, Fluet et al. revealed that the system of motor adaptation become damaged in patients with cerebellar lesion; however, it seems that it remains intact in patients with Parkinson’s disease (40). However, studies in patients with hemiparesis showed contradictory outcomes, because it is difficult to prove a learning impairment when the performance is already compromised or demonstrate a specific learning deficit given the heterogeneity of stroke patients (40, 41). For this reason, it is difficult to draw an unambiguous conclusion. Patients after a stroke can maintain the ability to learn some skills, depending on the kind of information provided from the surrounding environment, needed to learn a specific task. Considering that CNS injury often causes sensorimotor impairment, it is important to take into account the timing of the recovery process. Thus, the shock phase lasts 2–3 days, but after this period the CNS starts the spontaneous recovery process. Greater recovery occurs in the first 6–8 weeks, reaching a plateau phase approximately 3 months after stroke, but this fades within 6 months (5). However, several stud-ies, in addition to the current study, have shown that neuroplasticity may also occur in chronic stroke (> 6 months after stroke onset). Therefore, it is important to apply targeted interventions in the period when the CNS is more susceptible to change.
These preliminary data may be crucial in determin-ing whether patients at different stages should follow different treatment protocols (number of sessions, type of exercise, etc.) and may be used as the basis for the design of future randomized clinical trials.
Study limitations
This study has some limitations. Firstly, although the results showed that LE spasticity can be reduced, it seems that the VR therapy is not suitable for patients with extensive muscle spasticity (since the muscles could block joint movement and make tasks difficult to execute), hypotonia and cognitive disorders. VR therapy can therefore be used in patients with mild motor impairment of the LE. Secondly, the specific content of every exercise was not controlled during treatment. Thus, it is not possible to conclude which specific parameter was clinically useful. Thirdly, the training intensity was appropriate to the patients’ deficit; therefore, the number of repetitions was not recorded, which would be another limitation of the study. Fourthly, all patients underwent the physiotherapy programme simultaneously, and no specific indications or restrictions were given to a clinical physiotherapist. Fifthly, despite the large number of cases, there was no comparison with a control group that could provide more detailed information about the effect of VR therapy on the lower limb. Further research trials should take these aspects into consideration.
Conclusion
VR therapy combined with CP can be considered a useful tool for specific rehabilitation of the LE, which may result in better rehabilitation outcomes. All clinical scales showed motor improvement of the LE for both subacute and chronic groups post-stroke. Conversely, this improvement was confirmed by kinematic outcomes for the subacute group, but not for the chronic group. The group with mild severity of impairment achieved increased kinematic outcomes. These improvements were not observed in the severe and moderate groups. The clinical scale results were not correlated with the kinematic parameters, except BBS, which was correlated with the spatial error and jerk parameters. VR therapy was beneficial for patients with both left and right side lesions. The clinical and kinematic variables depended on age, time since stroke onset, lesion side and sex.
The authors thank all study participants, and Dr Katie Palmer for English language editing.
The authors have no conflicts of interest to declare.


 Click to show fullsize
Click to show fullsize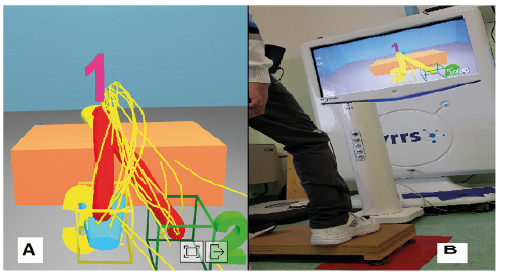 Click to show fullsize
Click to show fullsize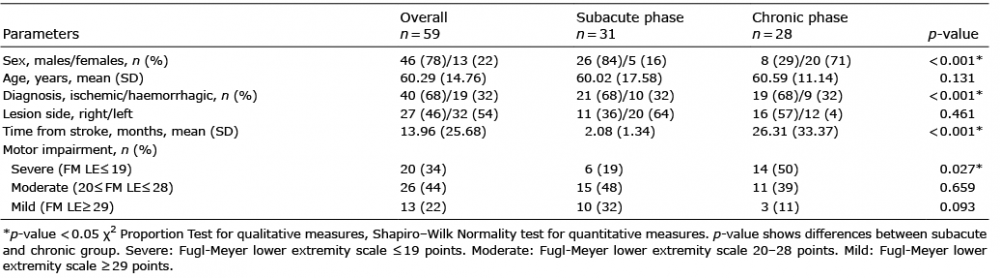 Click to show fullsize
Click to show fullsize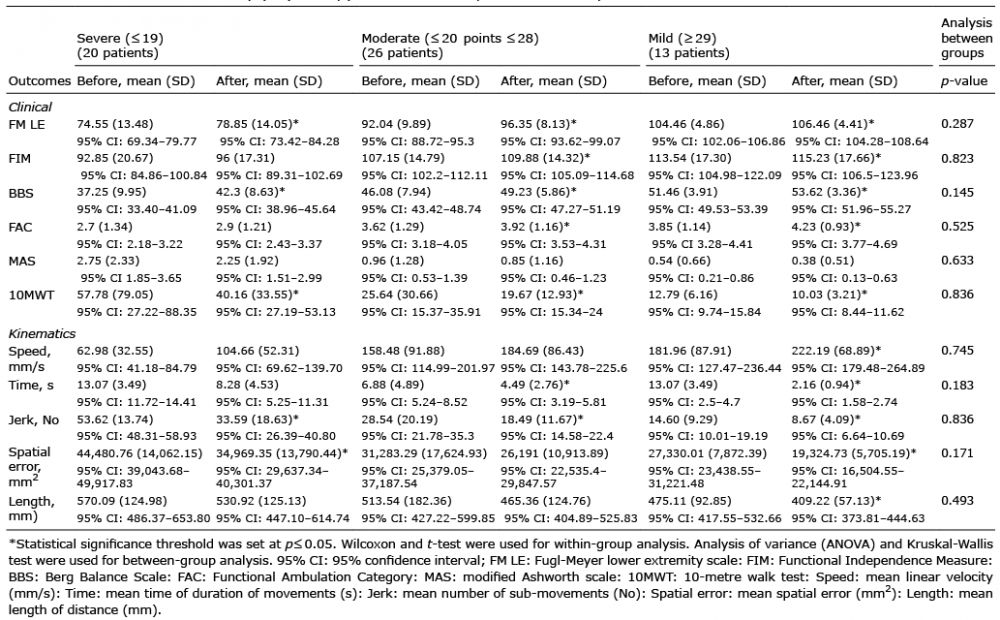 Click to show fullsize
Click to show fullsize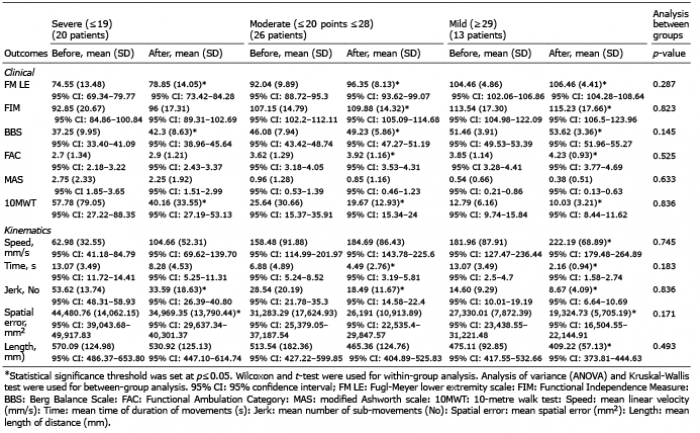 Click to show fullsize
Click to show fullsize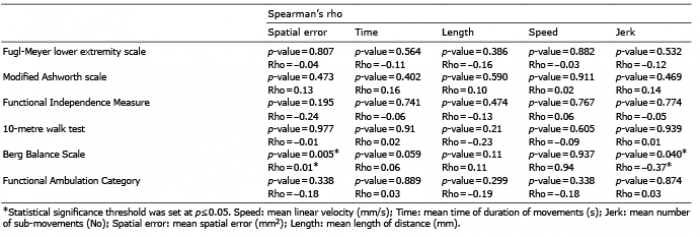 Click to show fullsize
Click to show fullsize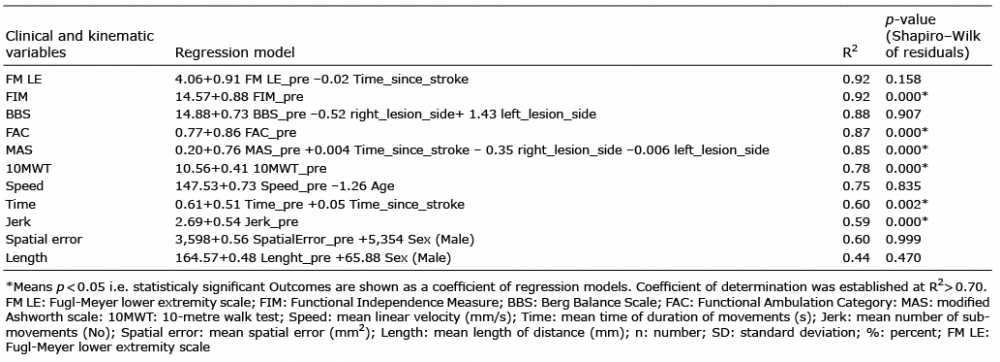 Click to show fullsize
Click to show fullsize